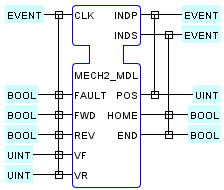
An instance of this Function Block type provides a model for
bidirectional motion along a single axis with sensors at both ends of
its motion. The
POS
output is expressed in units of 0% to 100% full scale, and the
VF
and
VR
inputs are expressed in % of full scale per "tick" of the
CLK
event input. The
HOME
and
END
outputs indicate the 0% and 100% full scale positions. The
IND
output indicates a change in the
POS, HOME
and/or
END
outputs.
Motion stops when the
FAULT
input is
TRUE
and resumes when it is
FALSE
, thus permitting the simulation of simple faults.
The direction and velocity of motion are determined by the internal
variable
SPEED
, derived from the
FWD
,
REV
and
FAULT
inputs as shown in the table below.
See the XBAR_MDLL FB
type for an example of the use of an instance of this type.
| FAULT | FWD | REV | SPEED |
|---|---|---|---|
| FALSE | FALSE | FALSE | 0 |
| FALSE | FALSE | TRUE | -VR |
| FALSE | TRUE | FALSE | VF |
| FALSE | TRUE | TRUE | VF-VR |
| TRUE | x | x | 0 |